Robot colaborativo de transporte
1. Equipado con sensores de fuerza, radar láser y otros sensores. Por ejemplo, cuando el robot entra en contacto con personas u obstáculos, los sensores de fuerza detectarán y detendrán inmediatamente el robot.
2. Puede realizar una variedad de tareas relacionadas con el transporte y también puede lograr más funciones reemplazando el efector final o agregando diferentes módulos funcionales.
3. Su estructura es relativamente simple, de tamaño pequeño, fácil de mover y reposicionar, y puede adaptarse a nuevos diseños de producción y requisitos de tareas en poco tiempo.
4. Admite programación y depuración rápidas, lo que puede acortar en gran medida el ciclo de implementación del proyecto y permitir que el robot entre en producción más rápidamente.
5. Realiza tareas de transporte repetitivas y regulares para mejorar la eficiencia general de la producción y la calidad del trabajo.
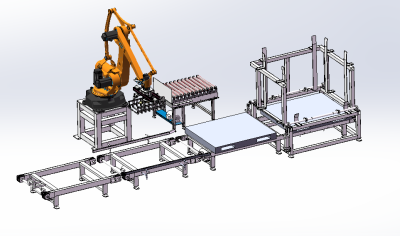
El robot colaborativo de transporte es un dispositivo inteligente diseñado específicamente para escenarios industriales y logísticos modernos, cuyo objetivo es lograr operaciones colaborativas y de transporte de materiales eficientes, precisas y seguras.
 Tiene una velocidad de movimiento rápida y una precisión de posicionamiento precisa, con una capacidad de carga máxima de 25 kg. Aún puede mantener una velocidad de funcionamiento estable y una alta precisión de posicionamiento cuando está completamente cargado.
Tiene una velocidad de movimiento rápida y una precisión de posicionamiento precisa, con una capacidad de carga máxima de 25 kg. Aún puede mantener una velocidad de funcionamiento estable y una alta precisión de posicionamiento cuando está completamente cargado.
 Diseñado para funcionar perfectamente con operadores humanos, el robot utiliza sensores para detectar la ubicación, los movimientos y las intenciones de los humanos en tiempo real. Cuando se detecta que un humano se acerca, el robot automáticamente reducirá la velocidad o dejará de moverse.
Diseñado para funcionar perfectamente con operadores humanos, el robot utiliza sensores para detectar la ubicación, los movimientos y las intenciones de los humanos en tiempo real. Cuando se detecta que un humano se acerca, el robot automáticamente reducirá la velocidad o dejará de moverse.
 Admite una variedad de modos de trabajo y tipos de tareas, ya sea manipulación simple de materiales, transporte de paletas o colaboración compleja en una línea de ensamblaje, clasificación y estantería de productos de almacén, etc., se puede lograr fácilmente mediante el reemplazo rápido del efector final y una programación simple. ajustes.
Admite una variedad de modos de trabajo y tipos de tareas, ya sea manipulación simple de materiales, transporte de paletas o colaboración compleja en una línea de ensamblaje, clasificación y estantería de productos de almacén, etc., se puede lograr fácilmente mediante el reemplazo rápido del efector final y una programación simple. ajustes.
 Equipados con una interfaz operativa simple e intuitiva y un método de programación conveniente, los operadores no necesitan tener una gran experiencia en robots ni habilidades de programación. A través de la interfaz de pantalla táctil o la guía del control remoto, pueden completar fácilmente la programación de tareas del robot.
Equipados con una interfaz operativa simple e intuitiva y un método de programación conveniente, los operadores no necesitan tener una gran experiencia en robots ni habilidades de programación. A través de la interfaz de pantalla táctil o la guía del control remoto, pueden completar fácilmente la programación de tareas del robot.

El uso de componentes de alta calidad y procesos de producción estrictos garantiza que el robot pueda mantener un funcionamiento estable y confiable en condiciones de trabajo de alta intensidad y a largo plazo.