





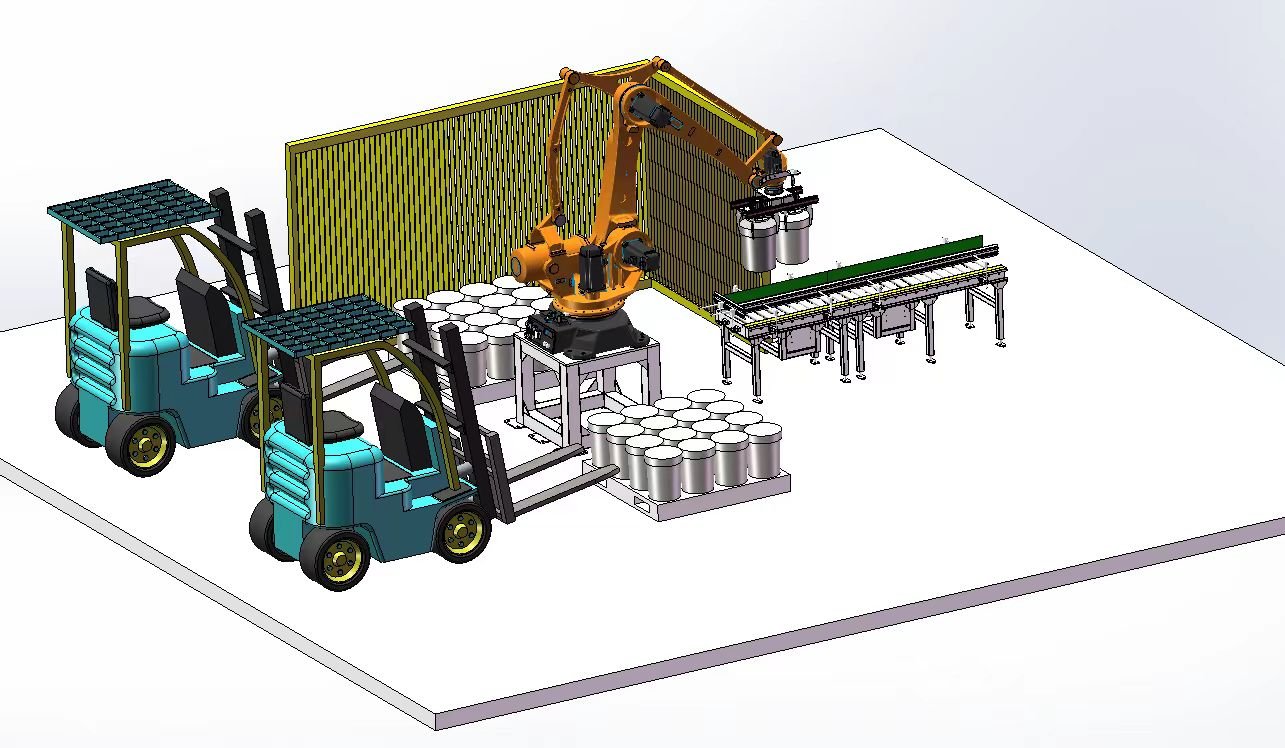



Paletizador automático de juntas
La máquina multiarticulada se parece a un brazo humano y se caracteriza por su capacidad de moverse con flexibilidad como una mano humana. Por ejemplo, cuando encuentra un obstáculo, el robot de articulaciones múltiples puede sortear el obstáculo para alcanzar el objetivo, lo cual es difícil para el robot industrial de tipo de coordenadas cilíndrica o polar general. Si es necesario realizar algunos movimientos especiales (movimiento de manivela), el robot multiarticular también es más fácil de realizar. Un robot con múltiples articulaciones también puede moverse de un punto a otro en tan poco tiempo como una mano humana. Si un robot multiarticulado está equipado con sensores táctiles y de fuerza en manos y muñecas, puede realizar trabajos cada vez más complejos.
Cuando una articulación en el brazo de un robot multiarticular gira en ángulo, las otras articulaciones y sus bielas producirán un movimiento en el espacio. En consecuencia, la garra alcanza una nueva posición y también cambia la dirección (actitud) de la posición. Por lo tanto, el robot multiarticular general debe ser controlado por computadora. El robot dispone de detectores de ángulo en cada articulación. Dado el ángulo de rotación de cada articulación, el problema de obtener la posición espacial y la actitud de la garra de la mano se denomina problema de análisis del control del movimiento. Por el contrario, dada la posición y actitud de la garra de la mano, el problema de cuánto ángulo debe girar cada biela de unión se denomina problema de síntesis del movimiento. La clave de estos problemas es cómo utilizar la computadora para realizar la transformación y el cálculo anteriores.








